

What Went Down in the April ROS-I Developers' Meeting
/On April 11 we held the ROS-I Developers’ Meeting. For those that haven’t checked one of these out, this is a gathering of developer-centric folks that are interested in hearing what is in development within the ROS-I ecosystem, what new resources may be available, and have some dialog on issues and/or areas for potential collaboration. This edition was hosted by the Americas ROS-I team, and we were fortunate to have three updates after a brief introduction.
Doug Smith shared work around OPC-UA and how to take advantage of this standard to enable PLC to ROS-based system interaction. Doug provided a few resources and shared a couple reference repos.
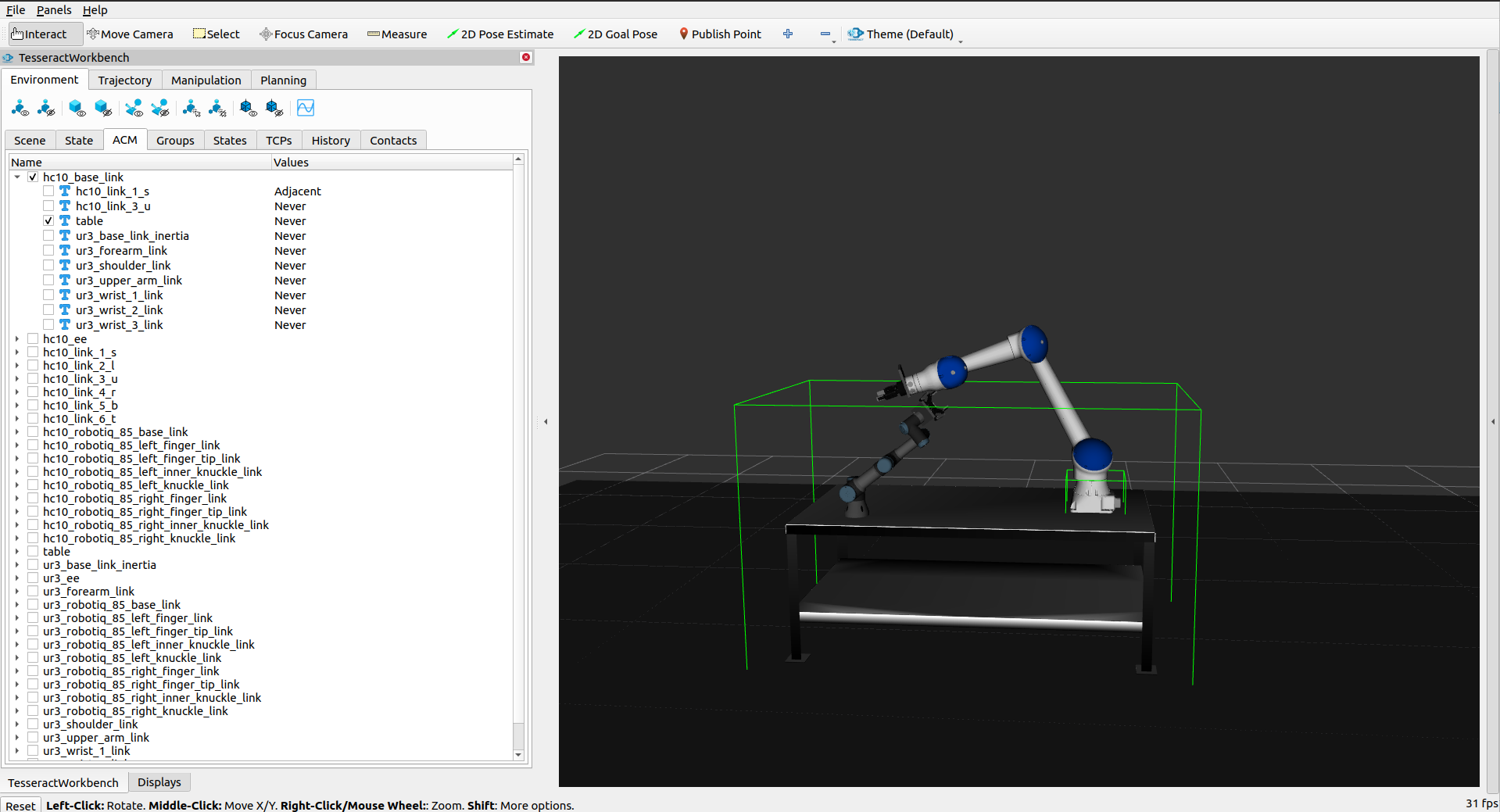
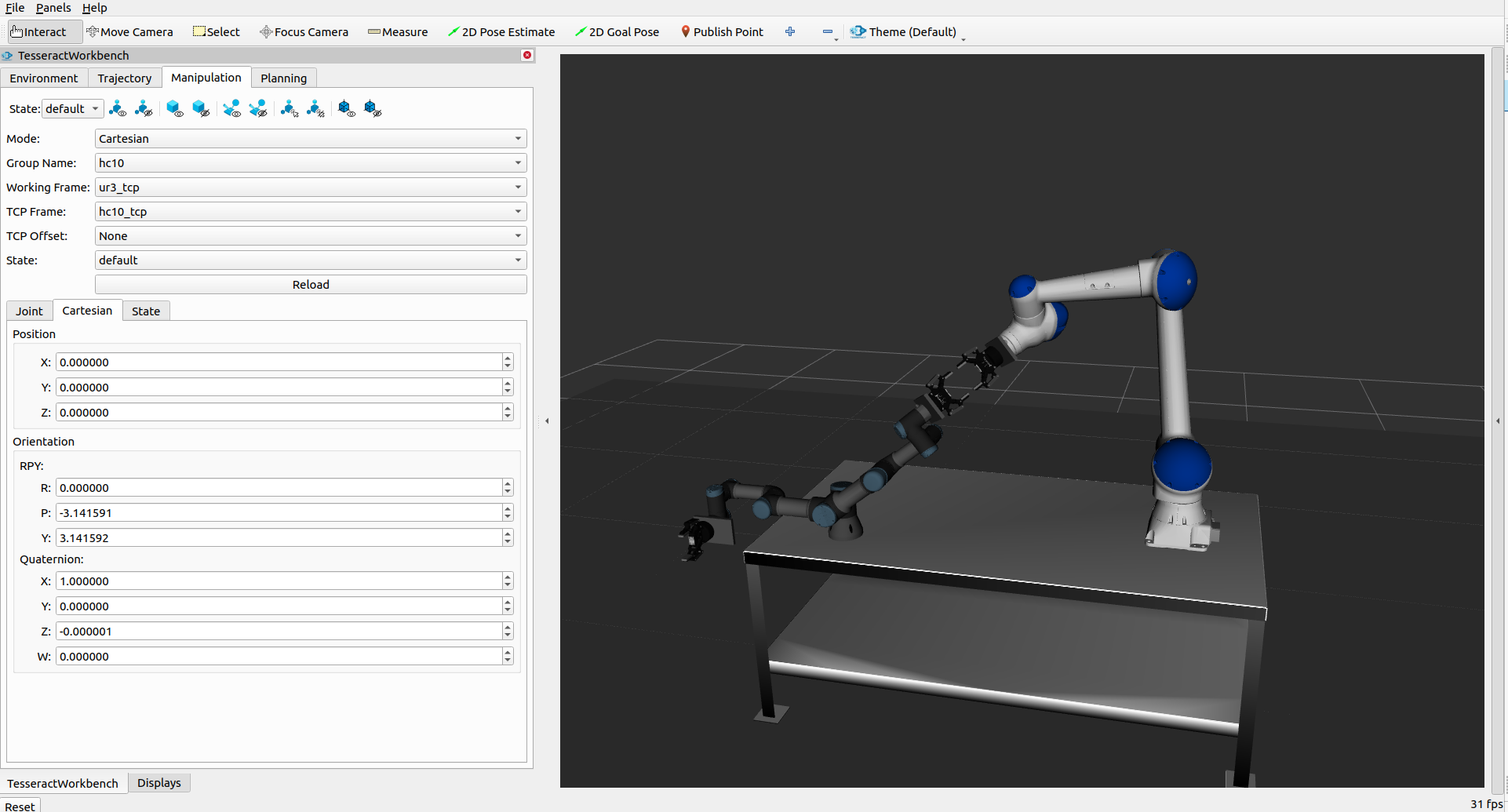
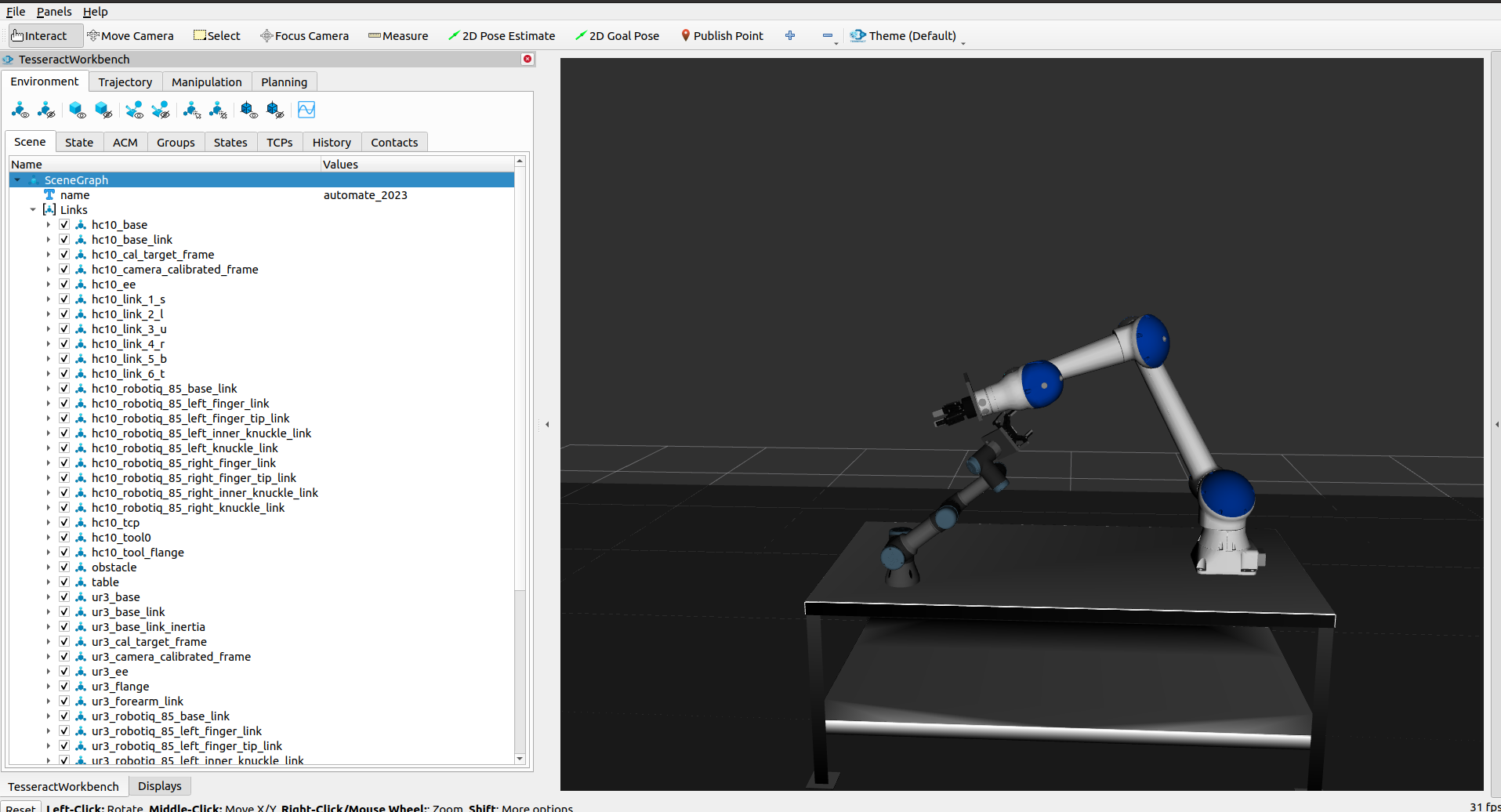
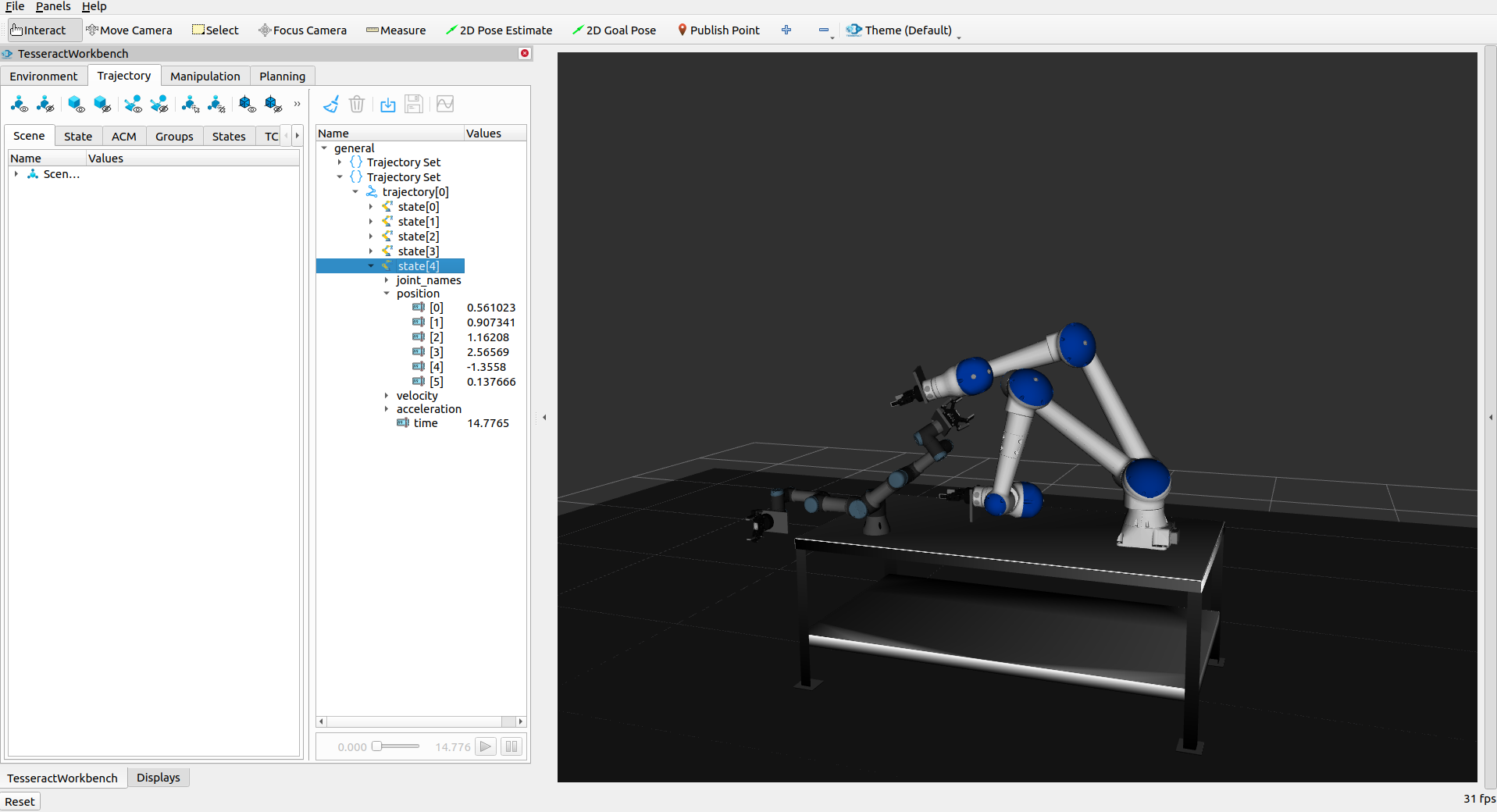
Tyler Marr shared the latest Tesseract updates around ROS 2. Tesseract ROS 2 is now fully working and has been tested in a few sample applications. Tyler also demonstrated some of the new Qt widgets for data visualization and collision checking.
- Lily Baye-Wallace shared the recent updates to the focused training topics that are built from the Scan-N-Plan Workshop which has evolved since the original offering as part of ROS World 2021. The new training content was piloted at the recent March 2023 ROS-Industrial Consortium training event.
- https://industrial-training-master.readthedocs.io/en/foxy/_source/session8/Motion-Planning-with-Tesseract.html
- https://github.com/ros-industrial-consortium/scan_n_plan_workshop
- https://github.com/ros-industrial-consortium/scan_n_plan_workshop/tree/master/snp_automate_2022
The meeting wrapped up around some great discussion around the FreeCAD ROS plug-in that has been in Beta informed by feedback from the ROS-Industrial end-user and developer community. Updates are coming and we appreciate the feedback and interest from the community to date. You can check out the full discussion in the video below and feel free to review the slides here. ROS-I Developer meetings are held monthly on a regional rotation basis. You can see the full schedule and register for each region here.