As part of the launch of SWORD and due to the roots in feedback from the ROS-Industrial Consortium to provide means to take advantage of the capabilities in ROS in an intuitive and graphical way (Easy Button!) we are excited to offer this free introduction to SWORD.

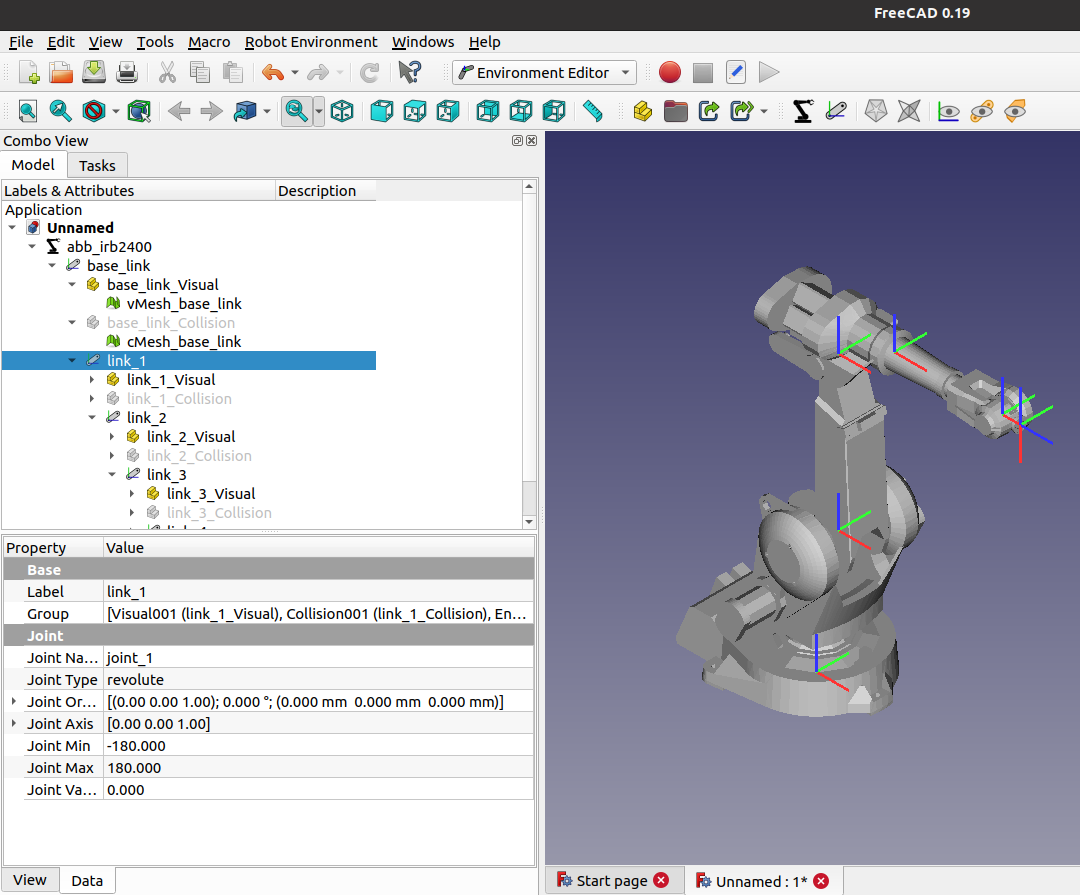
SwRI Workbench for Offline Robotics Development™ (SWORD™) is a plugin for FreeCAD that integrates robotics capabilities into a familiar, cross-platform environment. The easy-to-use graphical interface harnesses powerful motion-planning libraries for simplified, code-free robotics development.
SWORD is a streamlined tool for both robotics engineers and software developers. It supports Robot Operating System (ROS) applications or can be used independently of ROS. Check out the nice flyer with all the details!
Where: Southwest Research Institute Campus
When: March 26, Day before the ROS-Industrial Consortium Americas Annual Meeting.
Registration: Registration is required and it open! You can register for this even on this page: Registration CLOSED!
What: An interactive, hands on with SWORD setting up an application and experimenting with the various features. Some of which include:
Environment Modeling
- Create or import a CAD model of your robot,including fixtures and end-of-arm-tooling
- Manipulate and control your robot model using joint sliders
- Simulate movement with TCP Dragger using multiple IK solvers
Robot Manipulation and Motion Planning
- Generate motion plan using Tesseract-supported path planners
- Create custom planning pipelines for applicationspecific behavior
- Predict and avoid movement collision
Command Language
- Define robot motion using Cartesian or joint waypoints
- Specify different move segment types (joint/Cartesian) and motion groups
- Insert supplementary commands (I/O, delays, etc.)